
D-System
概要
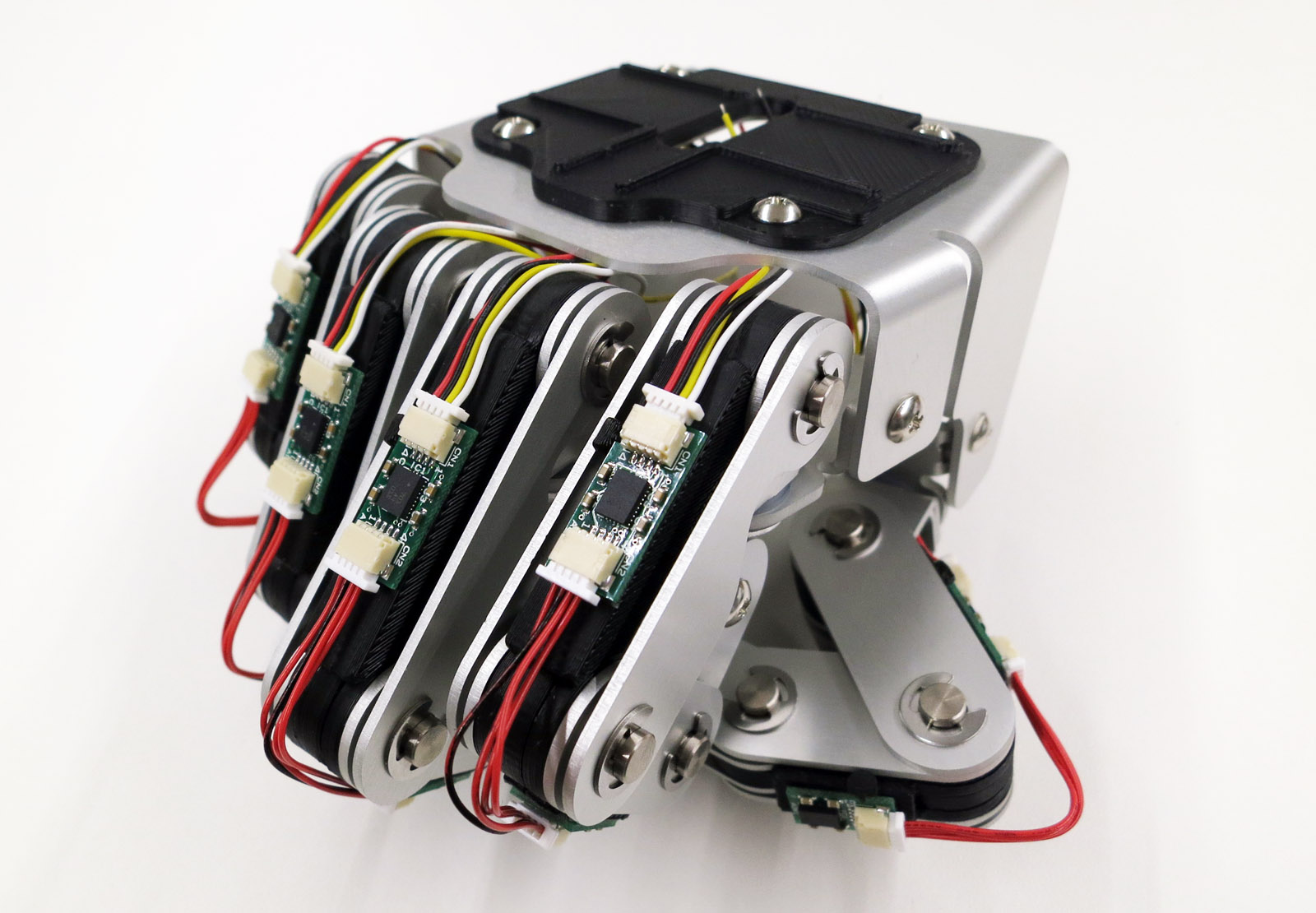
D-Systemは姿勢計測位置の小型9軸IMUセンサーボードから、クォータニオン相対角度を計算(特願2015-094015)し、基準姿勢からの相対姿勢を取得するシステムです。センサーの小型化により従来困難だった指先の計測も可能となりました。センサーは関節位置に取り付ける必要が無く、リンク上のどの位置も良いため、関節角度の計測方法も柔軟でシンプルになります。
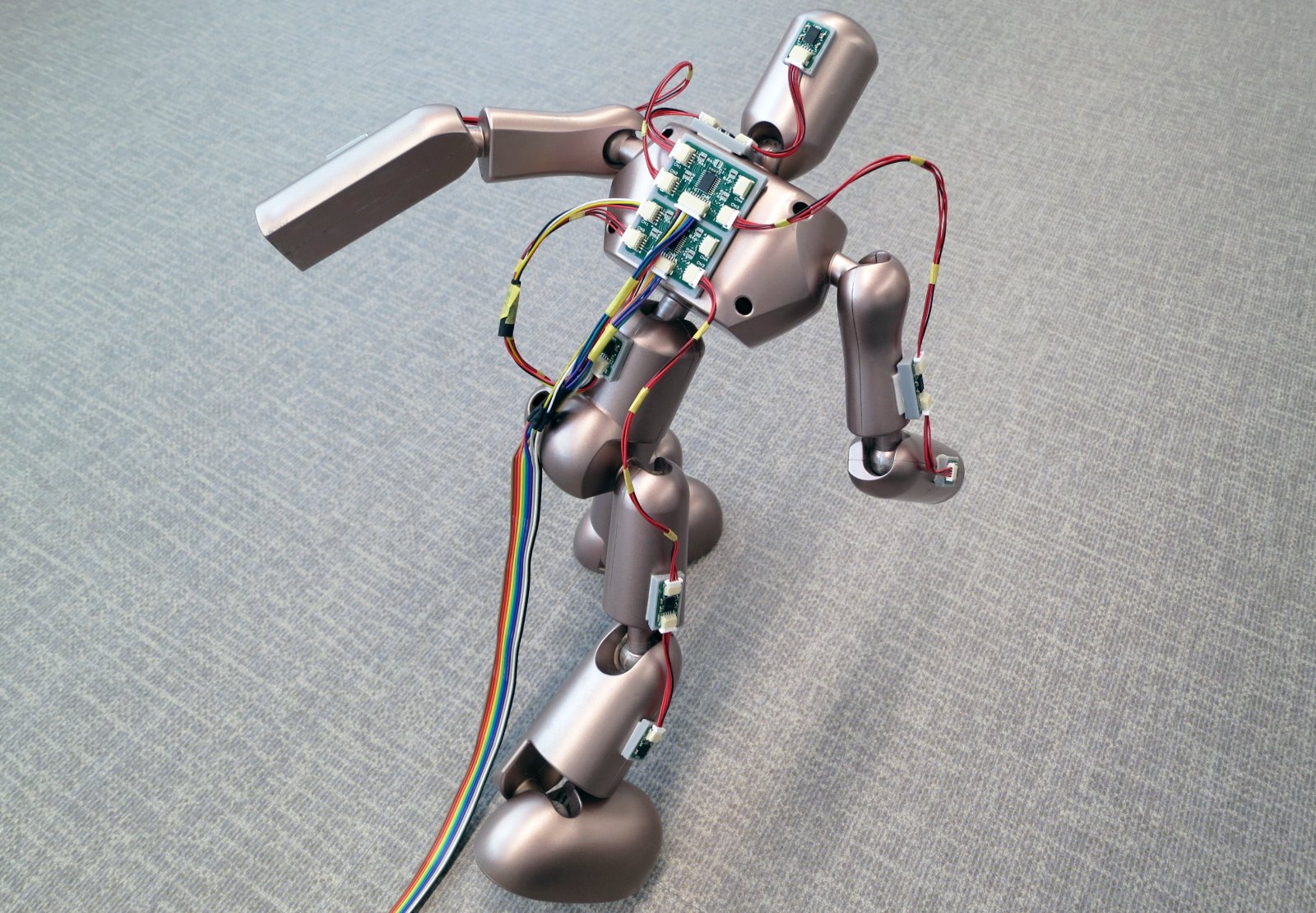
IMUセンサーは9軸(ジャイロ・加速度・地磁気)統合センサーとして単体使用可能ですが、2個以上の組み合わせで相対姿勢計測システムとなります。標準セット(センサーx4と基準センサー)では腕二本の動き、2セット分では四肢の動作計測が可能です。
通信は400kHz・I2C方式を採用。データパケットはクォータニオンデータですので、データ量は通常のRAWデータの1/10以下。そのため2セット分のセンサーの組み合わせでも10msという高速なサンプリング間隔での計測が可能です。スポーツ選手の運動解析や動物の行動記録など幅広い応用が可能できます。
最大の特徴として、任意のセンサー間で親子関係を作り出力データを親子間の相対角度にできます。相対角度はそのままロボットの同次座標変換行列に組み込むことができますので、多数のセンサーを組み込んだシステムでも非常に簡単に姿勢計算や手先位置計算が可能となります。これまで大変だった多数のジャイロからの姿勢角度算出は不要となりました。
システムへの組み込みをご希望の場合、取り込んだクォータニオンを取り扱うライブラリとリファレンスマニュアルをセットにしたSDK版もございます。またD-Systemを使ったシステム開発・設計もご相談下さい。
■ D-System内容
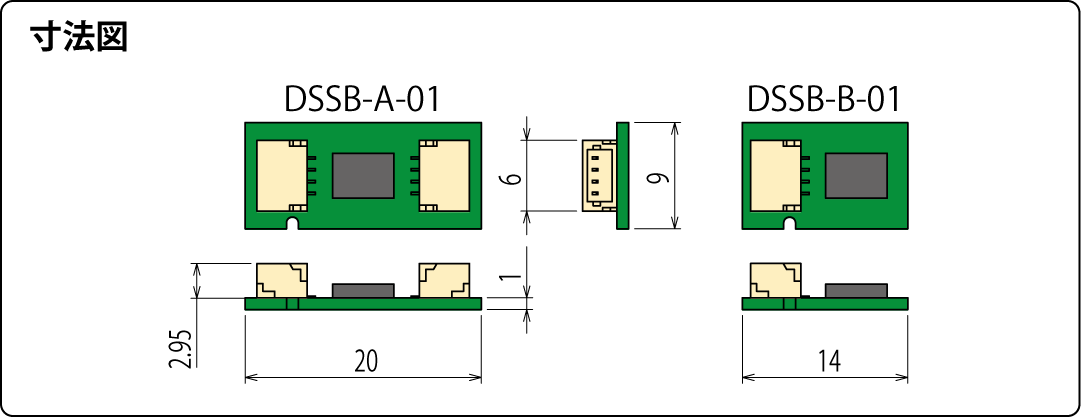
DSSB-A-01(両コネクタセンサー基板、9x20mm、I2Cアドレス0設定済み)、DSSB-B-01(片コネクタセンサー基板、9x14mm、I2Cアドレス1設定済み)、DSHUB-A-01(I2Cハブ基板)
*写真のハンドはレックデザイン株式会社様(rec-design.jp)の製品です。
寸法図
グラフPlotソフトウェア DSysXYPlot
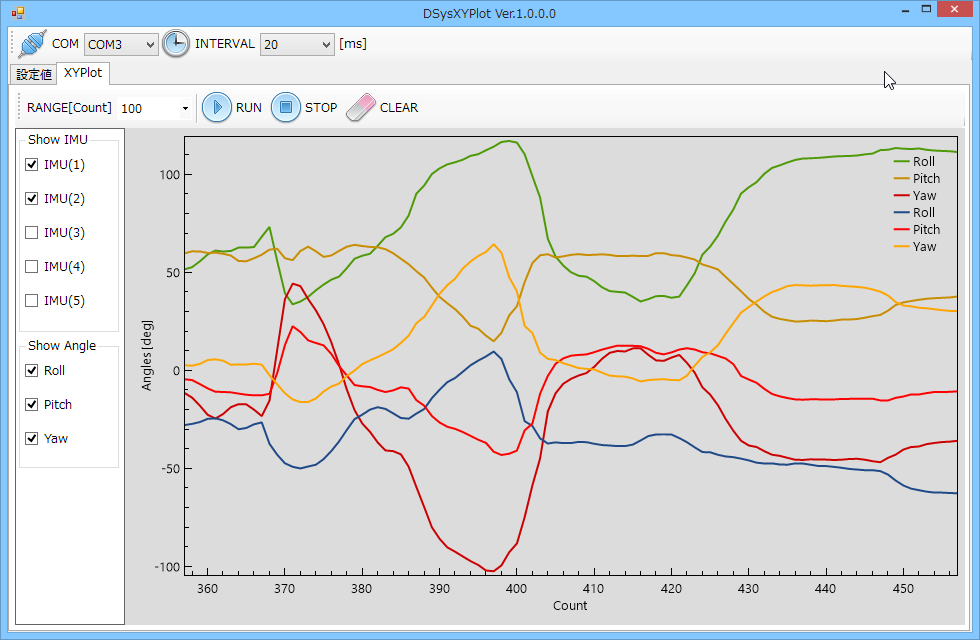
グラフ表示ソフトウェア(DSysXYPlot)では、各センサーのロール・ピッチ・ヨー軸を表示。データ取り込みインターバル(サンプリング間隔)調整や、グラフの拡大縮小なども可能です。Standard版ではPCからD-SYSTEMと通信するためのライブラリ「DSysLib」と「DSysLibマニュアル」が同梱されています。SDK版ではDSysXYPlotのソースコードが追加されています。
セット内容